Search
Robotics Automation and Control

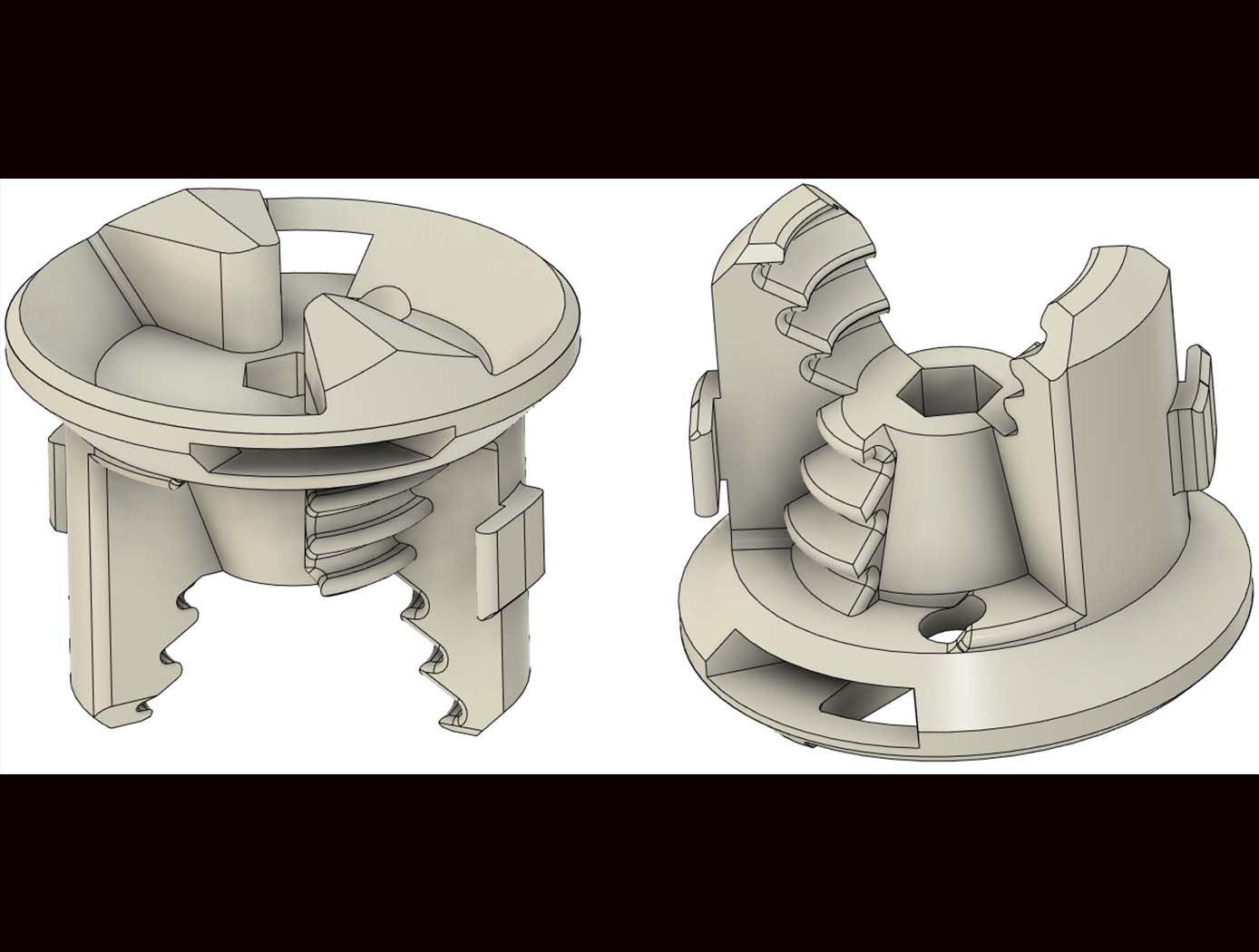
Single-Action-Lock Structural Space Joint
The SSS-Joint is an interlocking joint system for joining structure components such as struts, flat truss frames, and volumetric truss bays together to build bigger and more complex structure systems. The SSS-Joint interface can be applied to various connection scenarios commonly found in truss structure assembly, including but not limited to strut-to-strut connections, strut-to-node connections, and half-node-to-half-node connections. By incorporating half-node joints, the number of standalone components can be reduced by over 52%, and assembly steps can be decreased by over 65% compared to traditional truss tessellations without half-nodes.
In the current design, a single screwdriver can assemble all connections. The interlocking geometry of the SSS-joint features built-in guiding elements to aid the alignment process. Once in place, the screwdriver can rotate and engage with the spring-loaded captive lock-screw on the joint. The screwdriver tip does not need to be perfectly aligned, as the spring-loaded lock-screw will automatically pop into place within half a rotation after contact. This design dramatically reduces the complexity of the assembly process and eliminates the need for loose fasteners or specialized tools.
The SSS-joint offers a robust, lightweight, and scalable solution for modular structural assembly in space and terrestrial applications alike. The SSS-Joint has reached Technology Readiness Level (TRL) 5 (validated in a relevant environment) and is available for patent licensing.
Aerospace

Elastic Shape Morphing of Ultra-Light Structures by Programmable Assembly
The technology uses a base set of the substructure, interface, and skin building blocks to design an aerostructure that maximize the aerodynamic loading of the aero structure while maintaining the appropriate safety factor. The main substructure building blocks used are octahedral unit cells, which, when connected at their nodes, produce a cuboctahedral lattice structure. The interface building block set connects the vertices of the substructure building blocks to the skin components and the root and tip plates. The skin is a collection of flat and curved plates that are designed to overlap one-another and to transfer aerodynamic pressure loads directly to the substructure through the interface parts. Panels are not interconnected and thus do not behave as a structural stressed skin. Neighboring panels overlap by 10.2mm to ensure a continuous surface for airflow while still allowing panels to slide past one another during aeroelastic shape change. The structure was developed with adherence to the following guidelines: (i) All second voxel type groupings are limited to linear string shapes; (ii) No second voxel type grouping string can be longer than three blocks long; (iii) Second voxel type grouping strings can not be placed within two unit spaces of each other; (iv) Second voxel type grouping strings placed spanwise will reduce bending and torsional stiffness; (v) Second voxel type grouping strings placed chordwise decreases airfoil shape stability; (vii) Second voxel type grouping strings reduce the total length of building block extrusion.
Robotics Automation and Control
Reversible Androgynous Mechanical Fastener
The androgynous fastener is lightweight and facilitates assembly through simple actuation with large driver-positioning tolerance requirements. This fastener provides a high-strength, reversible mechanical connection and may be used in high strength-to-weight ratio structural systems, such as lattice structure systems. The androgynous fastener resists tensile and shear forces upon loading of the lattice structure system thereby ensuring that the struts of the lattice structure system govern the mechanical behavior of the system. The androgynous fastener eliminates building-block orientation requirements and allows assembly in all orthogonal build directions. This androgynous fastener may be captive in building-block structural elements thereby minimizing the logistical complexity of transporting additional fasteners. Integration of a plurality of the androgynous fasteners into a high performance, robotically managed, structural system reduces launch energy requirements, enables higher mission adaptivity and decreases system life-cycle costs. The androgynous fastener is beneficial in any application where robotic end effectors are used to join structural components (or other parts) together. It may be particularly desirable for applications requiring frequent movement of hardware to an assembly site to replace joint connections.
Information Technology and Software

Computer Vision Lends Precision to Robotic Grappling
The goal of this computer vision software is to take the guesswork out of grapple operations aboard the ISS by providing a robotic arm operator with real-time pose estimation of the grapple fixtures relative to the robotic arm’s end effectors. To solve this Perspective-n-Point challenge, the software uses computer vision algorithms to determine alignment solutions between the position of the camera eyepoint with the position of the end effector – as the borescope camera sensors are typically located several centimeters from their respective end effector grasping mechanisms.
The software includes a machine learning component that uses a trained Region-based Convolutional Neural Network (R-CNN) to provide the capability to analyze a live camera feed to determine ISS fixture targets a robotic arm operator can interact with on orbit. This feature is intended to increase the grappling operational range of ISS’s main robotic arm from a previous maximum of 0.5 meters for certain target types, to greater than 1.5 meters, while significantly reducing computation times for grasping operations.
Industrial automation and robotics applications that rely on computer vision solutions may find value in this software’s capabilities. A wide range of emerging terrestrial robotic applications, outside of controlled environments, may also find value in the dynamic object recognition and state determination capabilities of this technology as successfully demonstrated by NASA on-orbit.
This computer vision software is at a technology readiness level (TRL) 6, (system/sub-system model or prototype demonstration in an operational environment.), and the software is now available to license. Please note that NASA does not manufacture products itself for commercial sale.
Robotics Automation and Control

Robotic system for assembly and maintenance of lightweight reconfigurable structures
To enable the goal of autonomous assembly of high performing structures, a robot system must be able to travel across a lattice structure in all dimensions, transport and align a unit cell module to the correct location and fasten the module to the existing structure. In this system, a team of multiple mobile bipedal robots work together to carry, transfer, and place 3D-lattice modules (e.g., cuboctahedron voxels) to form a 3D lattice structure. The team of mobile bipedal robots autonomously provide transportation, placement, unpacking, and assembly of voxel modules into functional structures and systems. As the team of mobile bipedal robots live and locomote on the 3D-lattice structure, they monitor health and performance, enabling repair and reconfiguration when needed. The mobile bipedal robots work together in different roles, for example, one as a cargo transport robot and the other as a crane robot. The cargo transport robot and the crane robot work together to move the voxels from one location to another. Each robot includes at least one electronic control module that receives commands from another robot or a central control system. A central control system implements a plan to control the motion sequences of the robots to maximize efficiency and to optimize the work required to completely assemble a structure. The plan is pre-computed or computed during implementation by the central control system or the robots themselves, according to algorithms that utilize the regularity of the lattice structure to simplify path planning, align robotic motions with minimal feedback, and minimize the number of the degrees of freedom required for the robots to locomote across and throughout the 3D-lattice structure and perform structural assembly.

